Tällä kurssikerralla tutustuimme spatiaaliseen interpolointiin, jonka avulla estimoidaan ja tuotetaan pistetiedon pohjalta uutta aluemaista tietoa. Interpolointi on erittäin hyödyllinen keino tuottaa uutta tietoa lähes mistä vain spatiaalisesti jatkuvasta ilmiöstä tai ominaisuudesta mitatun paikkaan sidotun pistetiedon pohjalta. Harvoin tutkimuksissa ja maastomittauksissa on mahdollista kerätä tutkitun ominaisuuden arvoja koko tutkimusalueelta. Ominaisuusarvoja päädytään ajan ja rahan puutteen takia mittaamaan vain joistakin edustavimmista pisteistä, joten mittaustieto ei useinkaan ole alueellisesti täysin kattavaa. Interpolointi mahdollistaa kuitenkin näiden kerättyjen mittaustietojen pohjalta ominaisuusarvojen ennustamisen kaikille tutkimusalueen lopuille pisteille. (Holopainen ym., 2015, s. 67.)
Interpolointi käyttää ennustepinnan muodostamiseen mitattuja arvoja tunnetuista pisteistä, ja laskee niiden avulla estimoidut arvot pisteiden välisille alueille ja muodostaa niistä lopputuloksena rasteripinnan. Interpolointi on mahdollista tehdä deterministisellä tai geostatistisella interpolointitekniikalla, joista molempiin tekniikoihin kuuluu useita erilaisia interpolointimenetelmiä. Deterministiset interpolointimenetelmät perustuvat suoraan ennustettavan pisteen ympäristön mitattuihin arvoihin ja käyttävät interpolointiin matemaattisia funktioita (Holopainen ym., 2015, s. 68; 73). Näissä menetelmissä arvo estimoidaan lähimpien tunnettujen mittauspisteiden perusteella painottaen niitä etäisyyden mukaan, ja etäisyyspainotus valitaan yleensä ilman sen kummempia perusteluja (Antikainen, n.d.).
Geostatistisessa interpoloinnissa pyritään sen sijaan ymmärtämään havaintopisteissä mitattuihin arvoihin liittyvä säännönmukaisuus, ja käyttämään tätä tietoa tuntemattomien arvojen ennustamisessa (Antikainen, Määttä-Juntunen & Ujanen, 2015, s. 75). Geostatistinen interpolointi perustuu spatiaaliseen autokorrelaation ideaan, että lähellä toisiaan sijaitsevien pisteiden arvot ovat suuremmalla todennäköisyydellä lähellä toisiaan kuin kauempana toisistaan olevien pisteiden arvot (Holopainen ym., 2015, s. 67). Geostatistiset menetelmät käyttävät interpolointiin sekä matemaattisia että tilastollisia menetelmiä (Holopainen ym., 2015, s. 68; 73).
Kurssikerran ensimmäisessä harjoituksessa mallinnettiin liuenneen hapen määrää Chesapeake-lahden vedessä vuosina 2014 ja 2015. Veden happipitoisuus on vesistöjen tutkimuksessa tärkeä veden tilaa ilmaiseva suure ja yksi tärkeimmistä ympäristötekijöistä vesistön ekosysteemille. Hapen puute vedessä heikentää muun muassa eliöiden hajotustoimintaa, kalojen elämää ja aiheuttaa pahimmassa tapauksessa happikatoa vesistön pohjaan (Wikipedia, n.d.-a). Vesistön happipitoisuus määritellään heikoksi, jos liuenneen hapen määrä on alle 5,0 O2mg/L ja erittäin kriittiseksi eli hapettomaksi, jos määrä on alle 0,2 O2mg/L.
Harjoituksessa haluttiin tutkia Chesapeake-lahden veden tilaa kahden vuoden aikana ja vertailla liuenneen hapen määrässä tapahtunutta muutosta. Lähtöaineistona toimi lahdella sijaitsevien 131 mittauspisteen kattama pisteaineisto. Näiden pohjalta haluttiin interpoloimalla mallintaa liuenneen hapen määrän alueellista jakautumista koko lahden alueella. Tarkasteluun valittiin kesäkuukausien mittaustulokset, ja lisäksi huomioitiin ainoastaan mittauspisteet, jotka sijaitsivat yli 5 metrin syvyydessä.
Kesä ja loppukesä ovat otollisia aikoja happitilanteen tutkimiseen, koska kesän aikana muodostunut vesistön lämpötilakerrostuneisuus johtaa erityisesti rehevöityneessä vesistössä veden happipitoisuuden voimakkaaseen heikkenemiseen. Lämpötilakerrostuneessa vesistössä pinnan ja pohjan lämpötilaero on niin suuri, että eri vesikerrokset eivät sekoitu, eikä happea ei pääse kulkeutumaan syvempiin vesikerroksiin asti (Suomen ympäristökeskus, Ilmatieteen laitos &Tulvakeskus, 2019). Pohjan läheisen veden happitilanteen seuraaminen on tärkeää, koska pohjan hapettomuus voi osaltaan laukaista pohjasedimenttiin sitoutuneiden ravinteiden vapautumisen ja aiheuttaa vesistön sisäistä ravinnekuormitusta (Suomen ympäristökeskus SYKE, 2016).
Koska harjoituksen tutkimusalue on estuaari eli maa-alueen osittain suojaama jokisuualue, interpoloitavalla alueella esiintyvät niemenkärkien muodostamat epäjatkuvuuskohdat asettevat omat eritysvaatimuksensa interpolointimenetelmälle. Interpoloinnissa tulee huomioida mallinnettavalla alueella esiintyvät esteet, joiden yli tutkittava ominaisuus ei voi edetä vaan interpolointi tulee suorittaa rajan reunaa pitkin. Epäjatkuvuuskohtien huomioimiseksi ne täytyy olla digitoitu erilliseksi karttatasoksi, kuten tässä harjoituksessa lahden rantaviivan määrittäväksi polygoniksi.
Esteiden huomiomiseksi interpolointimenetelmäksi valikoitui Kernel interpolation with barriers, joka huomioi lahdenpoukaman niemenkärkien muodostamat epäjatkuvuuskohdat. Suurin osa interpolointitavoista määrittää pisteiden välisen etäisyyden euklidisena etäisyytenä eli suorana viivana kahden pisteen välillä. Kernel-interpolointimenetelmä määrittelee sen sijaan kahden pisteen välisen etäisyyden lyhyimmäksi suorien viivojen sekvenssiksi, jotka yhdistävät kaksi sijaintia ilman, että viivat ylittävät estettä.
Interpoloinnissa tärkeä tekijä on lisäksi se, kuinka laajalla alueella sijaitsevat havaintopisteet otetaan huomioon uuden pisteen arvoa laskettaessa. Liian kaukaa huomioitujen havaintopisteiden arvot voivat olla uuden pisteen arvon ennustamisessa haitallisia, koska ne voivat poiketa liikaa määritettävästä pisteestä (Holopainen ym., 2015, s. 68). Tämä vaatii naapuruusalueen laajuuden (bandwith) tilannekohtaista määrittämistä. Oletuksena ohjelmisto laskee etäisyyden pienimmän neliösumman menetelmällä, mutta harjoituksessa testailtiin, miten alueen koon muuttaminen vaikutti interpoloinnin lopputulokseen.

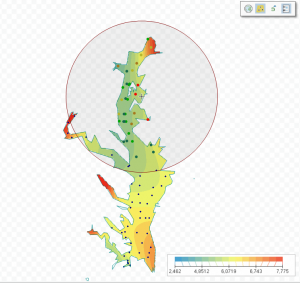
Valitsemalla naapuripisteiden etäisyydeksi 10 km interpoloidulle pinnalle jäi monia reikiä, joihin ei voitu tehdä ennusteita, koska mittauspisteitä ei ollut tarpeeksi tiheästi (kuva 1). Ennustettu arvo muuttuu myös epätasaisesti, kun se liikkuu pisteestä toiseen. Tämä naapuripisteiden välinen etäisyys on tähän lähtöaineistoon liian pieni.
Naapuripisteiden etäisyyttä kasvatettiin 100 km, jolloin laskenta otti huomioon laajalla alueella sijaitsevia naapuripisteitä (kuva 2). Tämä kuitenkin kadottaa alueellista vaihtelua ja tekee pinnasta liian sileän. Lopulliseksi naapuripisteiden etäisyydeksi määriteltiin 37,5 km, joka oli myös ohjelmiston esittämä oletusarvo. Ohjelmisto ehdottaa etäisyyttä, joka johtaa mallinnuksessa pienimpään mahdolliseen keskivirheen neliöjuuren ristiinvalidointivirheeseen. Jotta liuenneen hapen tilassa tapahtunutta muutosta voitiin vertailla, interpolointi suoritettiin lopuksi sekä vuodelle 2014 että 2015 (kuva 3).
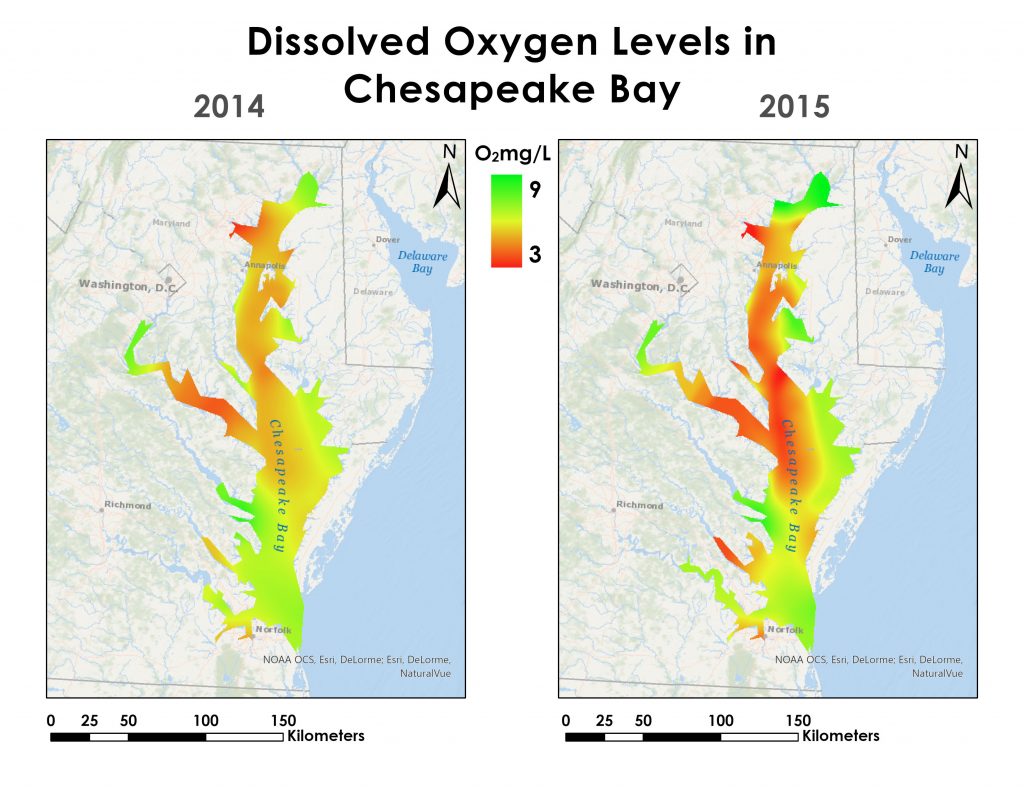
Chesapeake-lahden interpolointitulosten perusteella keskimääräiset liuenneen hapen tasot eivät vuosina 2014 ja 2015 alittaneet kuitenkaan hapetonta 0,2 O2mg/L-tasoa, mutta monet yksittäiset mittaukset olivat kriittisen 5,0 O2mg/L-tason alapuolella. Interpoloidun pinnan avulla voidaan visuaalisella tarkastelulla havaita, että kriittiset kohdat sijaitsevat erityisesti lahden luoteisosissa, ja tarkasteltujen vuosienosalta lahden happipitoisuus on ollut heikompi vuoden 2015 kesän aikana.
Ennustepisteiden luotettavuuden määrittäminen
Interpoloinnin tulosten luottevuus voidaan testata vertaamalla mitattuja arvoja interpoloituihin arvoihin ristiinvalidioinnin (Cross validation) avulla. Analyysi toistaa interpoloinnin lähtöaineiston jättäen laskutoimituksesta aina vuorotellen pois yhden mittauspisteen, ja laskee piilotetulle arvolle uuden estimoituidun arvon. Spatiaalisen interpoloinnin luotettavuutta voidaan sitten analysoida vertaamalla todellisten havaintoarvojen ja estimoidun arvon välistä poikkeamaa. Jos interpoloinnin tuottama mallinnus on luotettava, tulisi näiden kahden pisteen arvon olla mahdollisimman lähellä toisiaan. Jos mitatun arvon ja ennustetun arvon välinen erotuksen virhearvo on suurempi kuin nolla, se tarkoittaa, että ristiinvalidointi on tuottanut korkeamman arvon kuin todellinen arvo. Jos erotus on pienempi kuin nolla, ennuste oli pienempi kuin todellinen arvo.
ArcGIS ohjelmassa ristiinvalidiointi tuottaa valmista numeerista ja graafista diagnostikkaan tulosten analysoimiseksi. Harjoituksessa keskityttiin tarkastelemaan kahta tärkeää interpolointimenetelmän mallinnuksen tarkkuudesta kertovaa suuretta, keskivirheen neliöjuurta (Root mean square, RMS) ja estimointivirheiden keskiarvoa (Mean).
Keskivirheen neliöjuuri (Root mean square, RMS) on aina suurempi kuin nolla, mutta mitä lähempänä se on nollaa, sitä lähempänä ennustetut arvot ovat keskimäärin mitattuja arvoja. Virheen keskiarvon tulisi myös olla mahdollisimman lähellä nollaa, jolloin malli on puolueeton. Jos estimointivirheiden keskiarvo on päälle nollan interpolointi tuottaa yleisesti liian suuria arvoja, ja jos taas keskiarvo on alle nollan estimoidut luvut ovat pienempiä kuin todelliset luvut.
Spatiaalisen interpoloinnin laadunvarmistus tehtiin sekä vuoden 2014 että 2015 tuloksille. Keskivirheen neliöjuuri osoittaa, että vuonna 2014 estimoidut arvot heittivät todellisista arvoista keskimäärin 1,117 O2mg/L ja kesällä 2015 1,002 O2mg/L. Keskivirheen neliöjuuri on siis laskenut hieman vuosien välillä, ja ristiinvalidoinnin ennusteet olivat kesällä 2015 noin 10 prosenttia tarkempia kuin kesällä 2014. Myös estimointivirheen keskiarvo laski kesän 2014 0,045:stä kesän 2015 0,021:een. Koska arvon tulisi olla mahdollisimman lähellä nollaa, voidaan todeta, että kesän 2015 estimoidut arvot ovat hieman tarkempia.
Deterministiset intrepolointimenetelmät käyttävät estimointiin vain pisteistä mitattuja arvoja, ja muuttujan arvojen estimointi tunnettujen havaintopisteiden ulkopuolelle tapahtuu käyttäen matemaattista tasoitusfunktiota (Antikainen, Määttä-Juntunen & Ujanen, 2015, s. 75). Tästä johtuen deterministisille interpolointituloksille voidaan määritellä ainoastaan keskimääräinen virhe estimoidun ja mitatun arvon välillä, mutta tarkkaa mittausvirhettä ja virhemarginaalia joka pikselille ei voida määrittää.
Geostatistinen interpolointi 3D-aineistolle
Kurssikerran toisessa harjoituksessa tutustuimme geostatistiseen interpolointiin 3D-aineistolle. Geostatistinen interpolointi perustuu tilastolliseen mallintamiseen, mikä erottaa ne deterministisistä interpolointimenetelmistä (Antikainen, Määttä-Juntunen & Ujanen, 2015, s. 75). Geostatistisessa interpoloinnissa pyritään ymmärtämään havaintopisteissä mitattuihin arvoihin liittyvä säännönmukaisuus, ja käyttämään tätä tietoa tuntemattomien arvojen ennustamisessa. Geostatistiset interpolointimenetelmät mahdollistavatkin tulosten tarkkuuden analysoinnin ja virhemarginaalin määrittämisen. (Antikainen, Määttä-Juntunen & Ujanen, 2015, s. 75.)
Harjoituksessa tarkasteltiin vesistön happipitoisuuttaa Montereyn lahdella eri mittaussyvyyksissä. Koska vesistön happipitoisuus vaihtelee paitsi vesistön eri osissa niin myös syvyyssuunnassa, vesistön tilaa ja happipitoisuutta arvioitaessa on oleellista ottaa syvyystieto huomioon ja tarkastella liuenneen hapen määrää eri syvyyksissä. Harjoituksen lähtöaineistona toimikin lahdelta kerätty näytteenottoaineisto, jonka mittaussyvyydet vaihtelivat merenpinnasta aina −2080 metrin syvyyteen.
Koska tarkasteltava ominaisuus oli riippuvainen syvyydestä, tuli tämä huomioida myös interpolointitapaa valitessa. Interpolointimenetelmäksi valikoituikin Empirical Bayesian Kriging 3D -interpolointimenetelmä, joka mahdollistaa kolmiuloitteisen, eri syvyyksissä sijaitsevan, aineiston interopoloinnin sekä tarkastelun.
Kriging-menetelmän estimointiosuus on kaksivaiheinen, jossa ensimmäiseksi pyritään analysoimaan aineiston spatiaalista rakennetta ja toiseksi suoritetaan itse mallinnus (Holopainen ym., 2015, s. 74). Ensimmäisessa vaiheessa varsinaista mallinnusta varten aineistosta tulee tarkistaa, onko aineistossa spatiaalista autokorrelaatiota, onko aineisto normaalijakautunut ja millainen trendi aineistossa esiintyy? (Antikainen, Määttä-Juntunen & Ujanen, 2015, s. 79.)
Geostatistinen interpolointimenetelmän perusoletuksia ovat, että spatiaalisesti jatkuva aineiston on spatiaalisesti autokorreloitunut ja lisäksi etteivät muuttujan arvot riipu varsinaisesta xy-sijainnista, eli aineistossa ei esiinny yleistä trendiä. Joissakin tapauksissa muuttujan oletetaan lisäksi olevan normaalijakautunut. Tarvittaessa muuttujan arvoja onkin jakauman osalta mahdollista manipuloida muuttujamuunnoksien avulla, jotta aineisto saataisiin normaalijakautuneeksi. (Antikainen, Määttä-Juntunen & Ujanen, 2015, s. 76.)
Harjoituksessa aineistoa esitarkasteltiinkin histogrammin ja hajontakuvion avulla. Histogrammin perusteella arvioitiin, oliko aineisto normaalijakautunut ja voitiinko sille suorittaa mallinnus. Kokeilemalla eri muuttujamuunnoksia voitiin todeta, että logaritmimuunnos sai aineiston normaalijakautuneeksi. Hajontakuviosta arvioitiin aineistonhappipitoisuuden ja syvyyden välistä trendiä. Aineistosta tunnistettiin trendi, jossa happitasot voitiin arvioida kahdella paikallisella trendiviivalla syvyyden perusteella. Aineiston esitarkastelussa selvitetyt arvot voitiin siten ottaa huomioon itse interpoloinnissa, ja suorittaa tarvittava muuttujamuunnos ja trendin poisto. (Antikainen, Määttä-Juntunen & Ujanen, 2015, s. 79–80.)
Tulosten visualisointi ja luotettavuuden tarkastelu
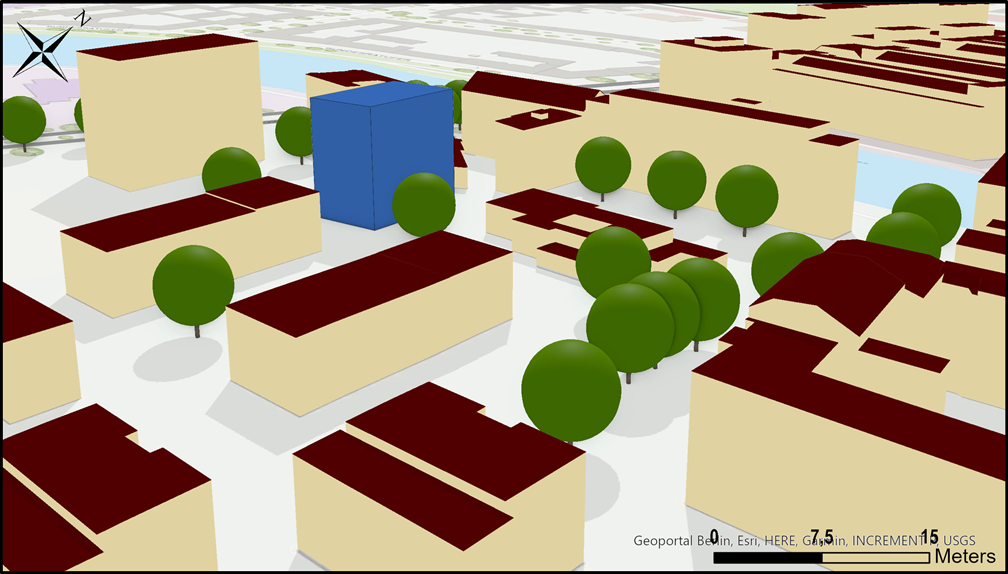
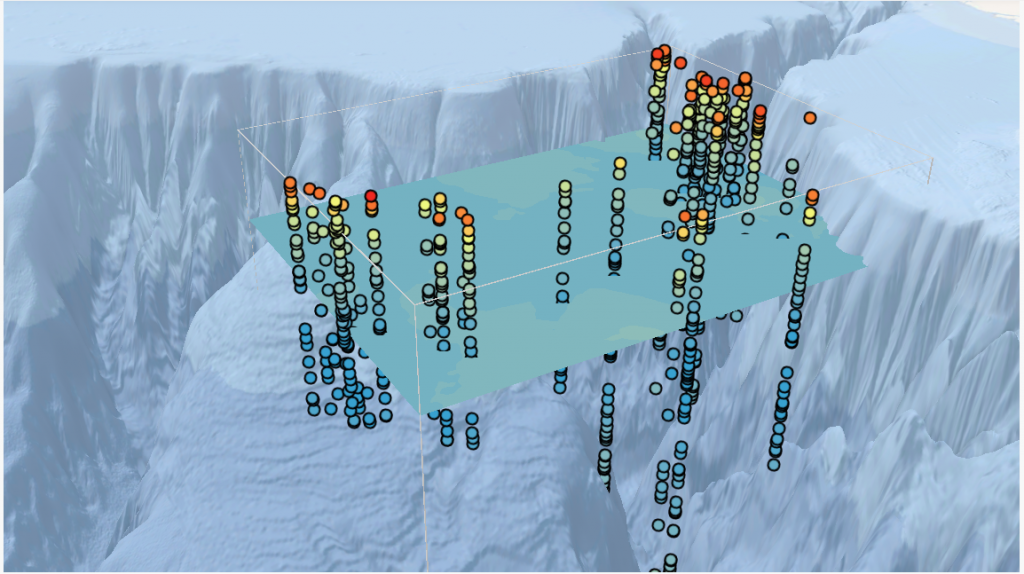
Interpoloinnin lopputuloksena syntyviä tasoja on mahdollista tarkastella sekä 2D- että 3D-maisemassa, mutta 3D-maiseman etuna on ehdottomasti se, että se mahdollistaa yhtäaikaisesti eri korkeuksissa sijaitsevia mittauspisteiden ja interpoloitujen tasojen visualisoinnin (kuva 4).
Geostatistisen interpolointimenetelmän erityisyys on myös siinä, että se tuottaa tietoa ennusteen luotettavuudesta jokaisen pikselin osalta. Geostatistiikka eroaa perinteisistä interpolointimenetelmistä tilastollisen luonteensa vuoksi, mikä mahdollistaa monipuolisemman mallin luotettavuuden arvioinnin. Tilastolliset tunnusluvut ja erilaiset hajontakuviot mahdollistavat myös useamman vaihtoehtoisen mallin vertailun. (Antikainen, Määttä-Juntunen & Ujanen, 2015, s. 83–84.)
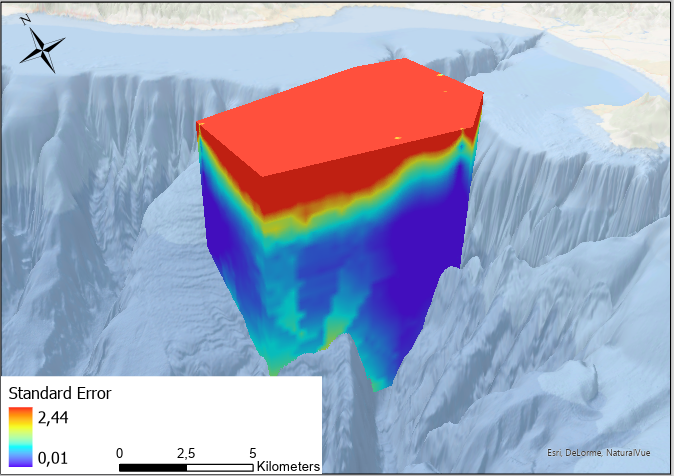
Lisäksi mallinnetun ennusteen luotettavuutta voidaan arvioida geostatistisen interpoloinnin automaattisesti muodostaman Standard Error -pinnan avulla. Interpoloinnin ns. sivutuotteena muodostunut pinta kuvastaa ennusteen alueellista epävarmuutta, ja sen avulla voi arvioida mallinnuksen alueellista tarkkuutta. Käytännössä epävarmuus on suoraan kytköksissä havaintopisteiden tiheyteen eli mitä kauempana havaintopisteestä ollaan, sitä epävarmempi on laskettu ennuste. (Antikainen, Määttä-Juntunen & Ujanen, 2015, s. 83–84.)
Jotta interpoloitua geostatistisen tasoa voidaan hyödyntää myös muissa jatkoanalyyseissä täytyy kukin interpoloitu taso muuttaa ja tallentaa käyttötarpeen mukaan joko rasteritasoiksi, pisteaineistoksi tai polygoneiksi. 3D-maisema mahdollistaa lopputuloksen visualisoimisen myös animaationa, joka on tehokas tapa visualisoida mallinnuksen lopputulos. Videossa on animoitu Montereyn lahden liuenneen hapen määrään vaihettumista merenpinnasta aina yli 2000 metriin syvyyteen.
Visualisoiminen kolmiulotteisena vokseligrafiikkana
3D-interpolointi mahdollistaa kaikkien mallinnettujen pintojen visualisoimisen myös vokselina (Voxel layer), joka on pikselin kolmiulotteinen vastine. Vokseli muodostaa kaikista aineiston pikseleistä kolmiulotteisen kuvamatriisin, joka voidaan tarkastella halutusta kuvakulmasta ja kohdasta. Näin samasta materiaalista voidaan luoda halutun suuntaisia leikesarjoja ja kohdetta voidaan katsella eri suunnista. (Wikipedia, n.d.-b.)
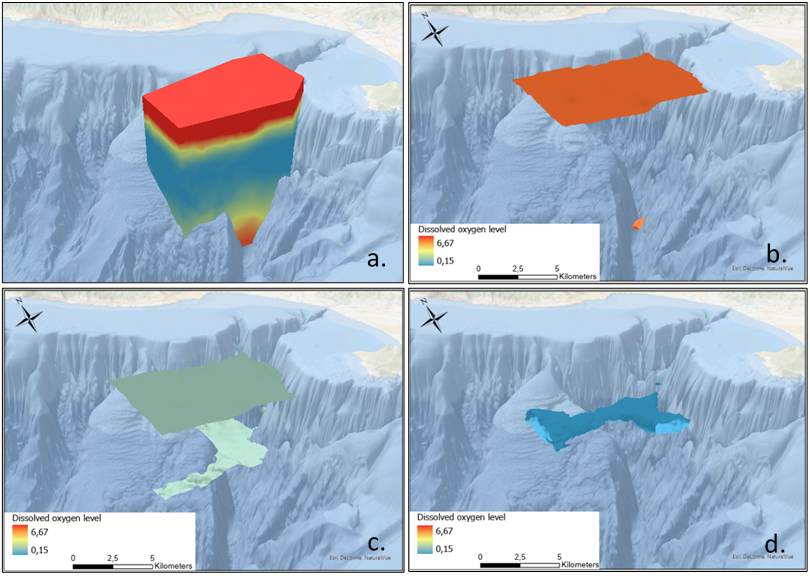
Harjoituksessa liuenneen hapen määrän syvyysvaihtelua että mallinnuksen keskivirhettä kuvaavat karttatasot visualisoitiin vokseliksi (kuva 5). Vokselin avulla voi saada käsityksen tarkastellun muuttujan kaikkien tasojen yhtäaikaisesta pysty- ja vaakasuuntaisesta vaihettumisesta (kuva 6). Vokselin avulla aineistoa voidaan myös tarkastella erillisinä samanarvonpintoina (isosurfaces), joilloin aineistoa on mahdollista tarkastella tasoina, joilla on sama arvo.
Yhteenveto
Erilaisia interpolointimenetelmiä on useita, ja ne tuottavat erilaisia pintoja. Kuhunkin mallinnukseen sopivin tekniikka riippuu aina muun muassa mallinnettavasta ominaisuudesta, havaintopisteiden määrästä ja laajuudesta sekä tietysti mallinnuksen tavoitteesta (Holopainen ym., 2015, s. 67). Kaikki interpoloinnit ovat kuitenkin aina vain approksimaatioita ja sisältävät virheitä. Yksinkertaisemmilla deterministisillä interpolointimenetelmillä voidaan laskea keskimääräinen ero estimoitujen ja mitattujen arvojen välillä, mutta tilastollisia menetelmiä hyödyntävien geostatististen interpolointimenetelmien etuna on se, että virheistä saadaan tarkempaa tietoa. Geostatistinen interpolointimenetelmä mahdollistaa virhemarginaalin määrittämisen kartan jokaiselle pikselille, jonka avulla voidaan tarkasti arvioida mallinnuksen tarkkuutta. Interpoloitaessa usein onkin tarpeen testata erilaisia vaihtoehtoisia malleja ja tarkastella, mikä menetelmä lopulta tuottaa tarkimman lopputuloksen ja pienimmän mahdollisen virheen.
Lähteet
Antikainen, H. (n.d.) GIS-jatkokurssi. Viikko 4: Spatiaalinen statistiikka. Haettu 8.12.2020 osoitteesta https://docplayer.fi/66521305-Gis-jatkokurssi-viikko-4-spatiaalinen-statistiikka-harri-antikainen.html
Antikainen, H., Määttä-Juntunen, H. & Ujanen, J. (2015). GIS-analyysimenetelmät ArcGIS 10.2.1 -ohjelmistolla. Oulun yliopiston maantieteen laitoksen opetusmoniste no. 43. Haettu 5.12.2020 osoitteesta http://jultika.oulu.fi/files/isbn9789526207889.pdf
Holopainen, M., Tokola, T., Vastaranta, M., Heikkilä, J., Huitu, H., Laamanen, R. & Alho, P. (2015). Geoinformatiikka luonnonvarojen hallinnassa. Helsingin yliopiston metsätieteiden laitoksen julkaisuja 7. Haettu 5.12.2020 osoitteesta http://hdl.handle.net/10138/166765
Suomen ympäristökeskus, Ilmatieteen laitos &Tulvakeskus. (2019, 2. joulukuuta). Vaivaako happikato? Haettu 8.12.2020 osoitteesta https://www.vesi.fi/vesitieto/vaivaako-happikato/
Suomen ympäristökeskus SYKE. (2016, 22. syyskuuta) Pintavesien tilan seuranta. Haettu 8.12.2020 osoitteesta https://www.ymparisto.fi/fi-FI/Vesi/Pintavesien_tila/Pintavesien_tilan_seuranta?f=PohjoisKarjalan_ELYkeskus
Wikipedia. (n.d.-a) Happipitoisuus (limnologia). Haettu 8.12.2020 osoitteesta https://fi.wikipedia.org/wiki/Happipitoisuus_(limnologia)
Wikipedia. (n.d.-b). Vokseli. Haettu 8.12.2020 osoitteesta https://fi.wikipedia.org/wiki/Vokseli
Yle. (2018, 8. tammikuuta) Meristä hiipuu happi – kuolleiden vyöhykkeiden määrä rannikoilla on kymmenkertaistunut. Haettu 8.12.2020 osoitteesta https://yle.fi/uutiset/3-10010357