Tällä kurssikerralla keskityimme kahteen näkyvyysanalyysiin, Viewshed- ja Line of Sight -analyysiin, sekä lopuksi vielä 3D-maisemaan kohteiden visualisoinnissa.
Kurssikerran aluksi tutustuimme tarkemmin näkyvyysanalyyseihin, jotka soveltuvat korkeusmallista muodostuvan maiseman tarkasteluun ja näkyvyyden analysointiin. Analyyseillä voidaan vastata kysymykseen, mitkä alueet tai kohteet voidaan nähdä katselupaikasta? Näkyvyysanalyysiä voidaan kuitenkin varsinaisen näkyvyyden lisäksi hyödyntää myös erilaisten kuuluvuus- ja melualueiden mallinnukseen (Antikainen, Määttä-Juntunen & Ujanen, 2015, s.58–59). Analyysin suorittaminen vaatii kuitenkin aina lähtöaineistoksi vähintään sekä tarkasteltavan alueen korkeusmallin että karttatason, jossa on määritelty tarkastelupaikka.
Viewshed- ja Line of Sight -analyysi tarkastelevat kumpikin korkeusmallin avulla, mitkä alueet näkyvät johonkin tarkastelukohteeseen, ja mitkä jäävät katveeseen. Näkyvyysanalyysi voidaan laskea suoraan maanpinnalta tai laskelmissa voidaan huomioida myös esimerkiksi kasvillisuuden ja rakennusten korkeustiedot ja siten aiheuttamat näköesteet. Vaikka kummankin näkyvyysanalyysin pääperiaate on sama, ne kumpikin mallintavat näkyvyyttä kuitenkin eri tavalla.
Viewshed-työkalu soveltuu parhaiten, kun tarkastelukohde on laajempi alue, ja siitä halutaan tunnistaa ne kohdat, jotka ovat näkyvissä määritellystä tarkastelupaikasta. Tarkastelupaikka voi olla yksi tai useampi piste, viivamainen kohde tai polygoni. Viewshed-työkalun lopputuloksena syntyy rasteritaso, jossa näkyvyysarvo on määritetty sen mukaan, onko pikseli näkyvissä tarkastelupaikasta vai ei. Jos tarkastelupisteitä on vain yksi, lopputuloksen saamat arvot ovat 0 = pikseli ei näy tai 1 = pikseli näkyy. Jos tarkastelupaikaksi on määritelty joukko pisteitä, analyysi laskee näkyvyyden jokaiselle tarkastelupaikalle, ja rasteritason arvot määrittyvät sen mukaan, kuinka monesta katselupaikasta kyseinen ruutu on nähtävissä. (Antikainen, Määttä-Juntunen & Ujanen, 2015, s.58–59.)
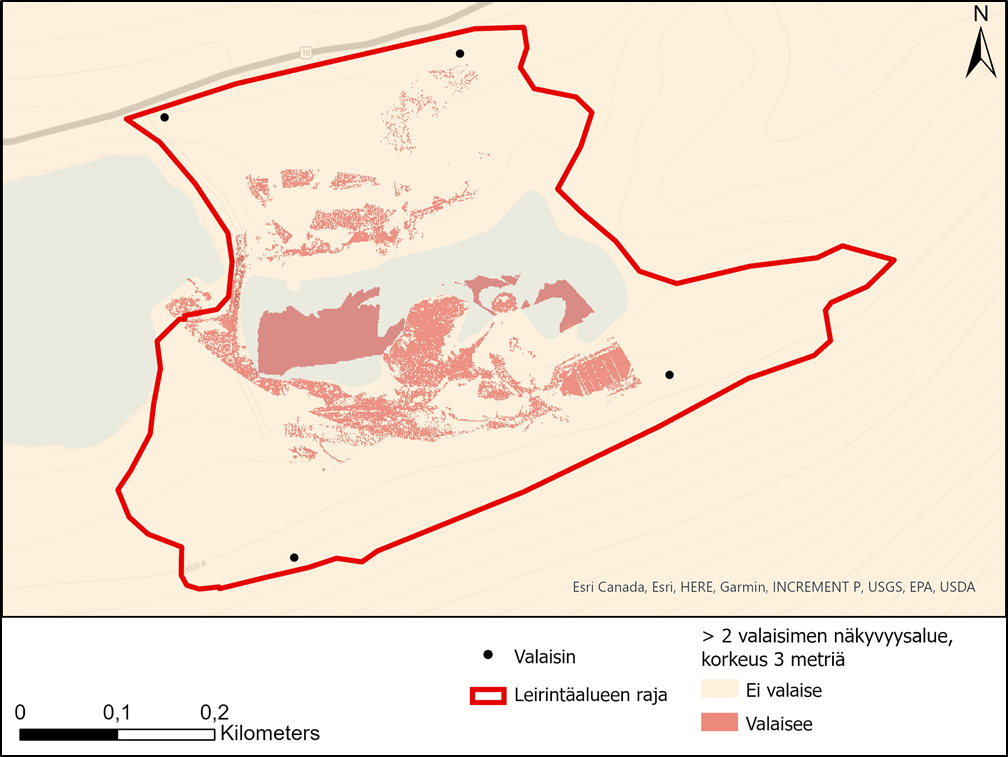
Tätä tarkastelutapaa hyödynnettiin kurssikerran ensimmäisessä harjoituksessa, jossa tehtävänä oli suunnitella uusi, neljän valotolpan muodostama, valaistusjärjestelmä leirintäalueelle New Yorkin osavaltiossa. Valaistusta suunniteltaessa haluttiin varmistaa, että mahdollisimman laaja osa leirintäalueesta olisi valaistu vähintään kolmesta valotolpasta. Valaisinvaihtoehtoja oli kaksi, 3 metriä korkeat ja 10 metriä korkeat valaisimet. Tehokkaimman valaistusjärjestelmän valitsemiseksi, harjoituksessa hyödynnettiin Viewshed-työkalua mallintamaan näiden kahden erikorkuisen valaistusjärjestelmän kattamaa aluetta ja helpottamaan näin lopullisen päätöksen tekemistä.
Harjoituksessa tarkastelupaikkoina toimi neljä pistemäistä valotolppaa. Viewshed-työkalussa on oletuksena, että tarkastelupiste tai -viiva sijaitsee yhden korkeusyksikön korkeudella maanpinnasta, mutta tätä tietoa voidaan muuttaa vastaamaan aina kunkin tarkastelukohteen todellisia tietoja. Tosielämän esimerkkien mallintaminen saattaakin usein edellyttää näkyvyyden heijastavan esimerkiksi tietystä kulmasta tai tietyn etäisyyden päähän. Viewshed-analyysissä on mahdollista huomioida näitä tekijöitä, ja lisätä ne tarkkailupisteen/viivan ominaisuustietoihin. (Antikainen, Määttä-Juntunen & Ujanen, 2015, s. 58–59.)
Harjoituksessa täydennettiin attribuuttitauluun vertailtavien valaisimien tekniset tiedot, kuten valaisimen korkeus maanpinnasta (OFFSETA=korkeus maanpinnasta), valon tulokulma (AZIMUTH1=tarkastelun laajuuden alkukulma) sekä valotehon maksimietäisyys (RADIUS2=etäisyys). Nämä tarkastelupaikan ominaisuustiedot toimivat reunaehtoina analyysille ja vaikuttavat lopputulokseen.
Tehokkaimman valaistusjärjestelmän valinnassa kriteerinä oli se, että suurimman osan leirintäalueesta tulisi olla valaistu vähintään kolmesta valotolpasta. Koska harjoituksessa tarkastelupisteitä oli neljä, lopputuloksessa rasterin arvo kertoo, moneenko näistä tarkastelupisteistä kyseinen solu näkyy. Aineistolle suoritettiin siis vielä loogisuusvertailu, jossa loogisen operaattorin avulla aineistosta valittiin vain solut, joiden arvo oli > 2.
Harjoituksessa analyysit suoritettiin sekä 3 metriä (kuva 1) että 10 metriä (kuva 2) korkeille valotolpille, ja vertaamalla näiden kummankin valaisinjärjestelmän valaisemia alueita, voitiin tulla lopputulokseen, että 10 metriä korkeat valaisintolpat täyttivät asetetut kriteerit paremmin ja sopivat siten leirintäalueen uudeksi valaisinjärjestelmäksi.
Analyysissä ei kuitenkaan huomioitu muita maastonesteitä, kuten puustoa, jonka korkeuden tuoman peittävyyden huomioiminen olisi varmasti vaikuttanut siihen, miten laajoja alueita valotolpat pystyivät valaisemaan.

Line of Sight -analyysi kuvaa näkyvyyttä linjaa pitkin
Line of Sight -näkyvyysanalyysi tarkastelee näkyvyyttä linjaa pitkin kahden kohteen välillä. Tässä analyysissä tarkastelupaikkana voi olla ainoastaan pistemuotinen vektori, ja tarkastelun kohteena voi olla yksi tai useampi piste, viiva tai polygoni. Analyysi perustuu siihen, että katselupisteestä piirretään suora jana, ja jos sen tiellä on esteitä, tulkitaan, että sen takana olevat kohteet jäävät peittoon. Jos katselupaikan ja katsottavan kohteen välinen suora ei leikkaa korkeusmallia niin kohde on nähtävissä.
Line of Sight -analyysiä hyödynnettiin kurssikerran toisessa harjoituksessa, jonka tehtävänä oli määrittää, mitkä Philadelphian keskustan läpi kulkevan paraatireitin kohdat oli nähtävissä kahdesta määritellystä tarkastelupisteestä. Harjoituksessa otettiin huomioon korkeusmallin lisäksi rakennusten peittävyys sekä määriteltiin näkyvyyslinjoille maksimietäisyys.
Näkyvyyden määrittäminen linjaa pitkin koostuu useammasta työvaiheesta, jossa aluksi tulee määrittää näköyhteys tarkasteltavien kohteiden välille. Näiden näkölinjojen pohjalta voidaan suorittaa näkyvyysanalyysi, jossa näkölinjoja verrataan maanpinnan ja rakennusten korkeustietojen aiheuttamiin esteisiin. Jos kohteiden välinen näkölinja leikkaa korkeusmallia tai muuta näköestettä, niin katsotaan ettei esteen taakse jäävä alue ole nähtävissä lähtöpisteestä.
Analyysin lopputuloksena näkölinjojen attribuuttauluun tallentuu uusi sarake, johon tulee tieto siitä, onko linjaa pitkin näköyhteys lähtö- ja päätepisteen välillä (0 = ei nähtävissä, 1 = on nähtävissä). Tieto visualisoidaan lisäksi kartassa, jossa vihreän värin saavat linjat, joista on näköyhteys päätepisteeseen ja punaisen värin ne näkölinjat, joiden tiellä on este, kuten esimerkiksi rakennus. Tällä tavoin harjoituksessa saatiin määriteltyä, mitkä kohdat paraatireitin osista olivat tarkkailijoiden nähtävissä ja mitkä taas eivät.
Tosielämän tilanteen tavoin harjoituksessa otettiin huomioon lisäksi näkyvyyden heikkeneminen, esimerkiksi sateen tai sumun takia. Näkyvyyslinjoja haluttiin siis lisäksi rajata maksimissaan 600 jalkaa (noin 180 metriä) pitkiksi. Näkyvyyslinjojen pituuden rajaaminen vaatii niiden mittaamista, ja sitten hakulausekkeella niiden kohteiden etsimistä ja poistamista, jotkä eivät täyttäneet kriteereitä (eli ei näkyvyyttä lähtö- ja päätepisteen välillä tai päälle 600 jalkaa pitkiä). Lopputuloksena saatiin karttaesitys, jonka näkölinjat osoittavat niihin paraatireitin kohtiin, jotka turvallisuushenkilöt voivat nähdä katoilla sijaitsevista tarkkailupisteistä (kuva 3).

Kaupunkien 3D-visualisointi
Kurssikerran viimeisessä harjoituksessa tutustuttiin ArcGIS paikkatieto-ohjelman tarjoamiin 3D-maisemien visualisointi keinoihin. 3D-maisema voidaan luoda käyttämällä vektori-, rasteri- ja korkeusmallitietoja, mutta tässä harjoituksessa keskityttiin pääasiassa vektorimuotoisten karttakohteiden 3D-visualisointiin. ArcGIS ohjelman 3D-työkalut mahdollistavat esimerkiksi 2D-karttaesityksen elävöittämisen visualisoimalla pistemuotoisia vektorikohteita kolmiulotteisilla symboleilla, jotka voivat kuvata realistisia tosielämän kohteita, kuten liikennevaloja tai puita. Jos pisteaineistoon on tallennettu lisäksi kohteiden korkeustietoja, voidaan tämä huomioida visualisoinnissa, esimerkiksi rakennusten ja puuston korkeudessa.

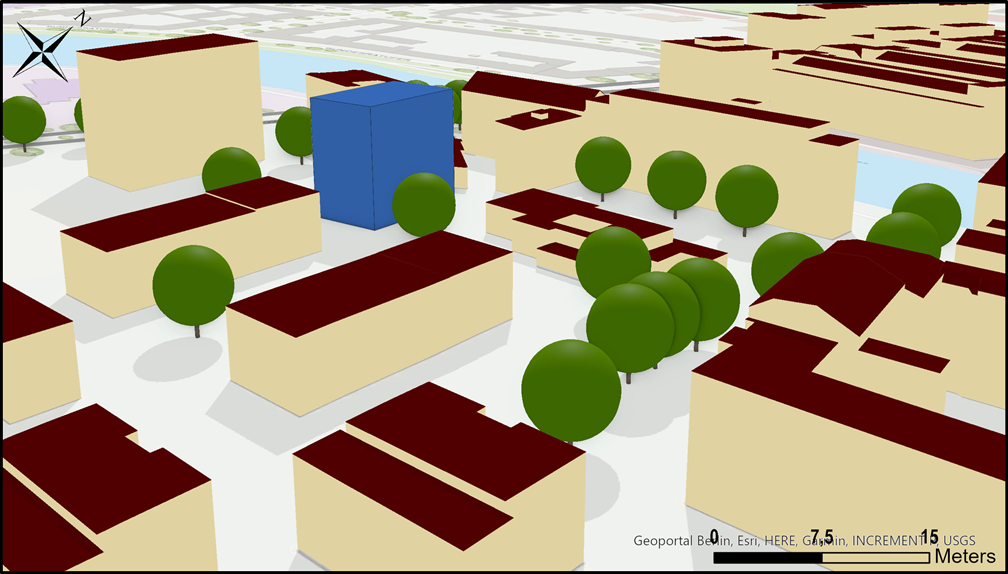
Pistemäisinä vektorikohteina voidaan siis visualisoitu paikkatieto-ohjelmistossa enemmän tosielämän kohteita kuvaavilla elementeillä, joiden avulla saadaan rakennettua hyvin realistinen kaupunki- ja katunäkymä alueesta (kuva 4). ArcGIS mahdollistaa lisäksi 3D-maisemassa liikkumisen, ja maisemaa voidaan tarkastella kaikista ilmansuunnista niin ilmasta lintuperspektiivistä kuin katutasosta.
Muita visualisointi keinoja on 3D-muotojen varjostus, jolla voidaan luoda syvyyttä kuviin ja siten parantaa tiedon laatua ja auttaa katsojaa hahmottamaan pintojen muotoja, korkeuseroja ja tekstuuria. Valaistusominaisuudella (Illuminating) voidaankin lisätä 3D-näkymään keinotekoinen valonlähde, ja tarkastella sen avulla korkeusvaihteluista, maaston esteistä sekä auringon asemasta muodostuvia varjostusalueita kolmiulotteisella pinnalla (kuva 5) (Holopainen ym., 2015, s. 88). Tätä ominaisuutta voitaisiin hyödyntää esimerkiksi asuntorakentamisessa, jos haluttaisiin määritellä korkean kerrostalon varjostavuutta muihin lähiympäristön taloihin eri vuorokauden- ja vuodenaikoina.

Kurssikerran viimeiseksi harjoitukseksi yhdistettiin aiemmissa 3D-harjoituksissa opitut asiat, ja harjoiteltiin rakennuksen ja ympäristön mallinnusta 3D-näkymäksi. Tehtävänä oli visualisoida Berliiniin suunnitellun uuden rakennuksen sijoittumista muuhun kaupunkikuvaan ja jo rakennettuun ympäröivään kaupunkiympäristöön kuten rakennuksiin ja puustoon. Harjoituksessa siis lisättiin jo olemassa olevaan kaupunkikuvaan suunniteltu uusi rakennus ja lisäksi lisättiin varjostus kaikille 3D-muodoille (kuva 6).
ArcGIS mahdollistaa eri mittakaavassa olevien 3D-näkymien luomisen aina koko maapalloa visualisoivista näkymistä paikallisempiin ja pienempiin alueisiin. Koska tässä harjoituksessa tavoitteena oli visualisoida vain yhden rakennuksen sijoittumista kaupunkikuvaan, soveltui paikallinen tarkastelu paremmin. Tälläisellä visualisoinnilla on myös mahdollista saadaan tarkempi ja yksityiskohtaisempi kuva tarkasteltavasta alueesta.
Kuhunkin visualisointiin kulloinkin parhaiten sopivat ratkaisut riippuvat siitä, mitä halutaan esittää ja millaista tietoa välittää. Tämä vaikuttaa siihen, mitkä elementit kuvassa tulee esiintyä sekä mitä tehostekeinoja on syytä käyttää. Datan analysoinnin ja uuden tiedon tuottamisen lisäksi ArcGIS taipuu siis myös tiedon visualisointiin monille eri tavoilla ja aina käyttötarpeesta riippuen.
Lähteet
Antikainen, H., Määttä-Juntunen, H. & Ujanen, J. (2015). GIS-analyysimenetelmät ArcGIS 10.2.1 -ohjelmistolla. Oulun yliopiston maantieteen laitoksen opetusmoniste no. 43. Haettu 2.12.2020 osoitteesta http://jultika.oulu.fi/files/isbn9789526207889.pdf
Holopainen, M., Tokola, T., Vastaranta, M., Heikkilä, J., Huitu, H., Laamanen, R. & Alho, P. (2015). Geoinformatiikka luonnonvarojen hallinnassa. Helsingin yliopiston metsätieteiden laitoksen julkaisuja 7. Haettu 2.12.2020 osoitteesta http://hdl.handle.net/10138/166765