
Heippa!
Tämän viikon aiheena oli näkyvyys- ja maisema-analyysi. Näkyvyysanalyysilla saadaan selville ne alueet, jotka voidaan nähdä tietystä kohdepisteestä. Tällä on monenlaisia sovelluskohteita, ja se on hyödyllinen mm. maisemasuunnittelussa (Holopainen ym., 2015) Jonkin kohteen näkyvyyttä voidaan analyysin avulla niin parantaa kuin huonontaa, esim. jokin tuotantolaitos voidaan ”piilottaa” maisemaan.
Yleisin näkyvyysanalyysi on viewshed analysis, jossa mukaan otetaan useita katselupisteitä. Harvinaisempi versio on ns. line of sight -analyysi, jossa on vain yksi katselupiste. Menetelmästä tiivistäen voi sanoa, että jos etäisyyden ja korkeuden suhdeluku tietyssä pikselissä on suurempi kuin aiemmissa pikseleissä, kohde näkyy tuohon pikseliin. Jos taas pienempi, kohde ei näy.
Vaellusreitin kuuluvuusalueet
Harjoituksessa tutkittiin hypoteettisen vaellusreitin alueen mobiililaitteiden kuuluvuutta: kuuluvuuden katto- ja katvealueita. Aloitin tuomalla ArcGisiin korkeusmallin ja GSM-tukiasemamastot. Sitten visualisoin alueen korkeusmallin sekä digitoin vaellusreitin (kuva 1). Reitin pituudeksi tuli 62,986 km.
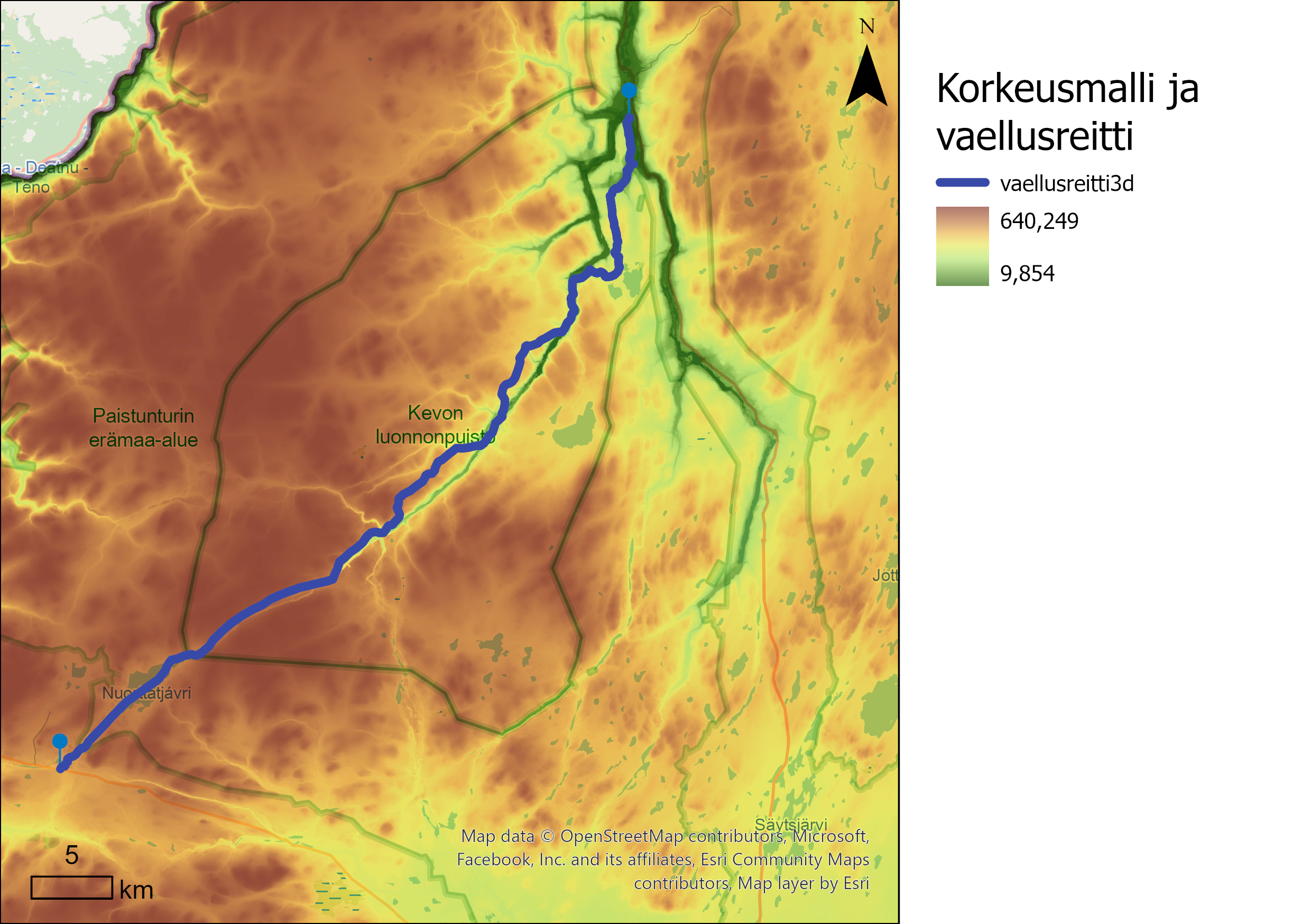
Kuva 1. Kevon kanjonin korkeusmalli ja keksitty vaellusreitti.
Näkyvyysanalyysissa kyse ei siis ole vain konkreettisesti näkymisestä, vaan myös vaikkapa kuuluvuus tai muun signaalin kulku on se, mitä näkyvyysanalyysin avulla selvitetään. Seuraavaksi tein Line of Sight -analyysin Visibility-työkalulla. Muutin rasterin polygonitasoksi, jossa kuuluvuusalueen pikselit saivat arvon 1 ja kuuluvuusalueen ulkopuoliset alueet arvon NODATA. Tuloksena on kuvan 2 kartta, jossa näkyy punaisella katvealueelle jäävät reitin osat.
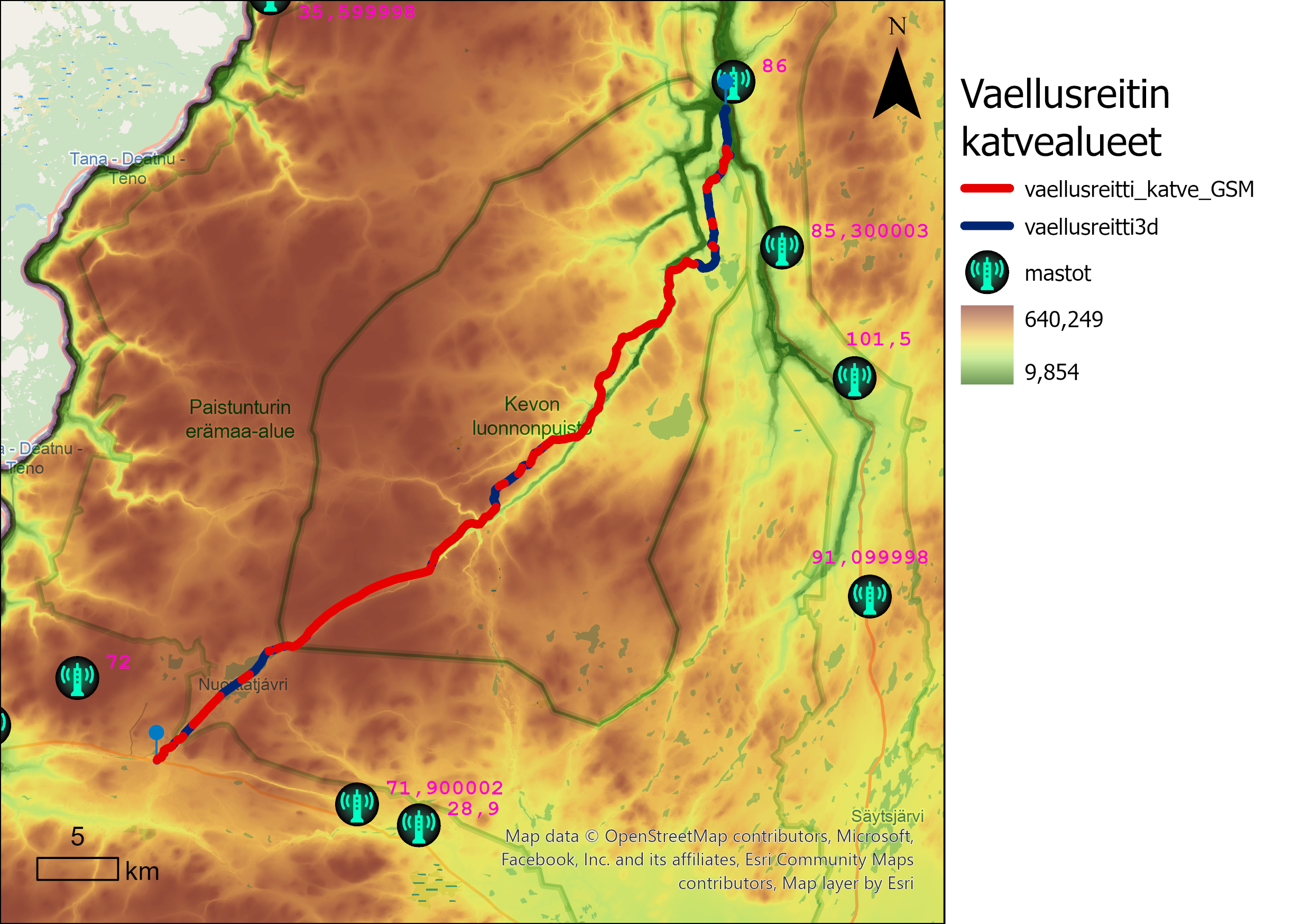
Kuva 2. Keksityn vaellusreitin katvealueet.
Reitistä 39,309 km, eli n. 62% on katvealueella. (Tämä attribuuttitaulukon antama tieto on hieman hämmentävä, sillä kuvan 2 perusteella näyttäisi, että paljon enemmänkin kuin 62% on katvealueella.)
Parannettu kuuluvuus
Seuraavaksi parannetaan kattavuutta lisäämällä alueelle uusi tukiasemamasto. Tämäkin toteutetaan näkyvyysanalyysin avulla (kuva 3). Tutkittuani eri karttatasoja valitsin pisteen, joka voisi olla potentiaalisesti parhaita uudelle mastolle.
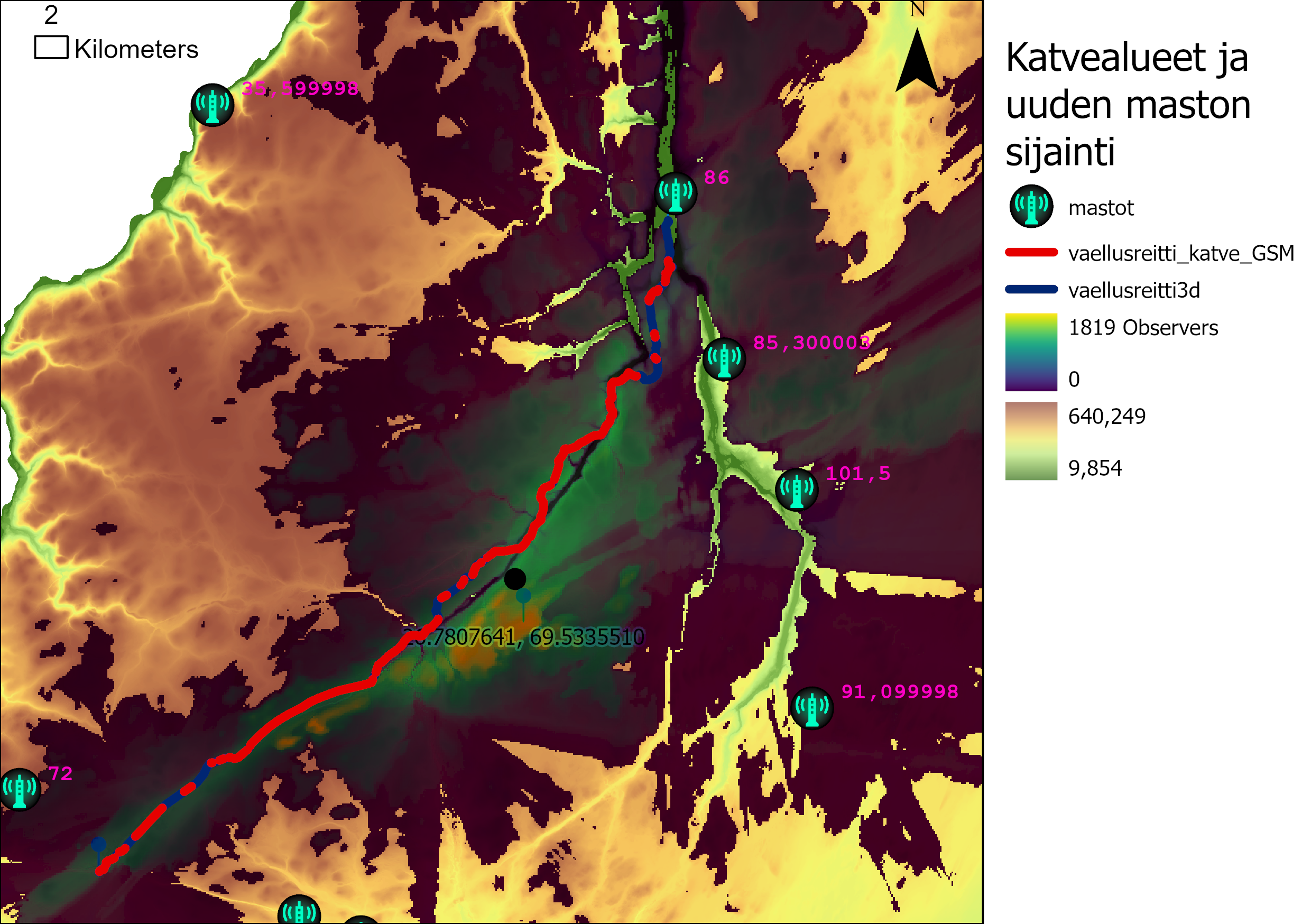
Kuva 3. Uuden maston sijainti ja näkyvyysanalyysin tulos.
Mustalla pisteellä on arvaukseni siitä, mikä olisi paras sijainti uudelle mastolle. Osuinkin aika lähelle, sillä analyysi antoi tulokseksi aivan lähellä olevan pikselin, joka näkyy kuvassa 3 haaleana mustan pisteen alapuolella koordinaattien kanssa. (En saanut näitä pisteitä näkyviin ilman, että muutin Raster Layer-välilehdeltä Layer Blendiksi ’Multiply’. Jostain syystä tässä ei auttanut edes ko. karttatasojen nostaminen Contents-paneelissa ylimmäiseksi. Siksi tämä kartta ei ole kovin kivan näköinen, mutta uuden maston ja arvauksen sijainti sentään tulee edes hieman näkyviin.) Uuden tukiasemapisteen koordinaatit ovat siis 69,5335510°N ja 26,7807641°. Uuden maston paras paikka löytyi niin, että etsittiin se pikseli, joka sai korkeimman arvon.
Tässä harjoituksen kohdassa resoluutio vaihdettiin 10 metristä 100 metriin. Tämä voi vaikuttaa analyysin lopputulokseen jonkin verran. Toisaalta käyttämäni teoreettinen tukiasemamaston kantama on 35 km, joten ehkä tässä mittakaavassa vaikutus ei ole niin merkittävä?
Lopuksi tein vielä uuden näkyvyysanalyysin, jossa tämä uusi masto oli mukana. Uuden maston avulla katvealueella oli nyt vain 23,357 km reitistä, eli 37% (kuva 4).
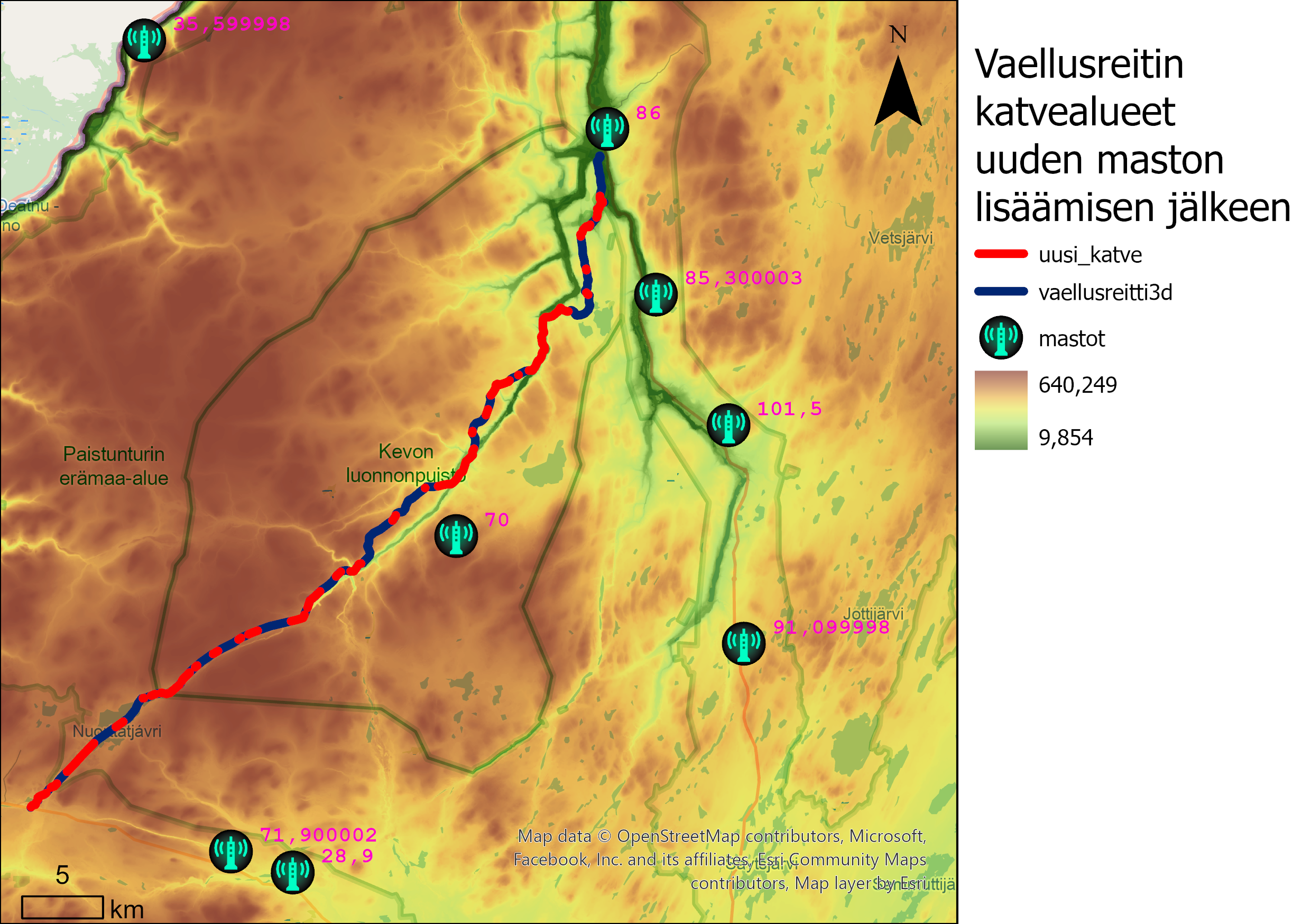
Kuva 4. Vaellusreitin katvealueet uuden maston lisäämisen jälkeen.
Lähteet:
Holopainen et al. (2015). Geoinformatiikka luonnonvarojen hallinnassa. Helsingin yliopiston metsätieteiden laitoksen julkaisuja 7