Tällä viikolla tehtiin näkyvyysanalyyseja sekä lisää 3D-harjoituksia, jotka olivat ainakin minun mielestäni siistejä! Harjoituksia oli kolme ja lisäksi yksi bonustehtävä.
Ensimmäisessä tehtävässä tarkoituksena oli asettaa valot New Yorkin osavaltion itäiselle telttailualueelle, jotta telttailualue voisi vastaanottaa enemmän kävijöitä myös pimeään aikaan. Tehtävän alussa harjoiteltiin databasen käyttöä ja sinne tallennusta.
Tämän jälkeen datan, joka kertoo valojen sijainnista, attribuuttitaulukkoon lisättiin tietoja (OFFSETA = valopylväitten korkeus, AZIMUTH 1 ja 2 = missä kulmassa valo on ja RADIUS2 = kuinka pitkälle valon täytyy näkyä). Seuraavaksi harjoituksessa käytetiin viewshed –toimintoa, jotta saadaan näkyviin alueet, joihin valot osuvat ja mahdolliset päällekkäisyydet valokeiloissa etsitään raster functionsin avulla.
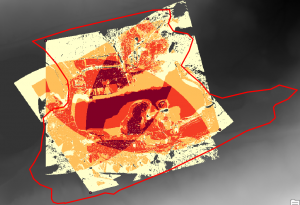
Seuraavaksi muutetaan OFFSETA attribuuttitaulukosta 3 -> 10, joka tarkoittaa, että valopylväät olisivatkin 3 metrin sijasta 10 metrin korkuisia. Uudelle datalle tehdään samainen viewshed -toiminto, jolloin tulos on kuvan 1 mukainen. Kun suoritetaan vielä raster functions –toiminto, saadaan lopputulokseksi kuva 2.
Harjoituksessa 2 tarkoituksena oli tehdä näkyvyysanalyysi siitä, millaisen näkyvyyden turvallisuudesta vastaavat henkilöt saisivat paraatista. Data esitettiin 3D-muodossa.
Ensiksi aloitettiin havainnollistamalla näköalaa katselupisteistä paraatireitille käyttämällä toimintoa Construct Sight Lines, jonka jälkeen tätä työstettiin vielä Line of Sight –toiminnolla, jotta saatiin äsken luotujen linjojen näkyvyys esille. 3D-karttaan ilmestyy sekä vihreitä, että punaisia viivoja (valitettavasti tästä ei tullut välivaihekuvaa), joista punaisia viivoja blokkaa jokin este, esim rakennus. Vihreät viivat ovat ne, joita tässä harjoituksessa haetaan.
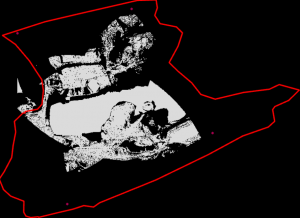
Jotta viivoille saadaan haluttu 3D-ulottuvuus, käytetään toimintoa Add Z Information. Select by Attribute –toiminnolla karsitaan vielä viivat, jotka ovat kauempana kuin 1100 jalkaa (feet). Ohjeissa mainittiin, että mahdolliset paikalliset sääilmiöt saattavat vähentää näkyvyyttä, joten analyysit toistettiin, mutta näkyvyys vaihdettiin 600 jalkaan (feet). Lopullinen tulos oli kuvan 3 mukainen.
Harjoituksesta yksi ja kaksi mieleeni tuli, että tällaista näkyvyysanalyysia voisi käyttää myös esimerkiksi kun suunnitellaan valvontakameroiden sijoituspaikkoja.
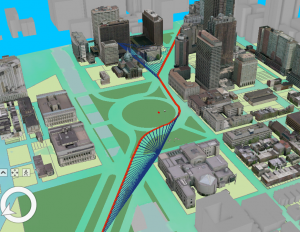
Kolmas harjoitus keskittyä täysin 3D-maailman pariin. Aluksi opeteltiin lisäämään karttaan moniulotteisia karttasymboleja, kuten liikennevaloja, ja muutenkin syvennyttiin 3D-merkkien pariin. Karttaan myös lisättiin 3D-rakennusten aikaansaamat varjot (kuva 4).
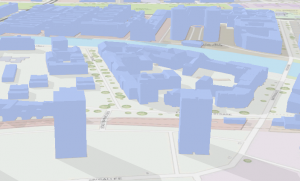
Harjoituksen toisessa vaiheessa hahmoteltiin näkymää Berliinissä, jossa asemakaavaan lisättäisiin yksi rakennus (sinisellä). Ympärillä on esitettynä nykyiset rakennukset sekä puut tietyltä alueelta. Kuvasta 5 käy ilmi uuden rakennuksen paikka.

BONUS
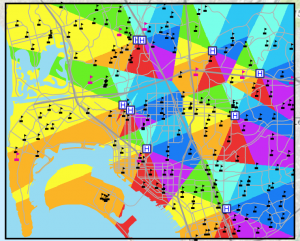
Bonustehtävän tarkoituksena oli tutkia koulujen ja sairaaloiden välisiä matkoja, jos kyseiset tilanteet vaatisivat mediheliä. Harjoituksen ensimmäisessä osiossa käytettiin Eucledian –toimintoa, jotta saatiin havainnollistettua matka linnuntietä sairaaloista kouluihin ja lisäksi suunta sekä matkan pituus. Nämä tehtiin erikseen samalla toiminnolla (Eucledian). Divide –toimintoa käytettiin, jotta saatiin mailit osoitettua jalkoina (feet).
Jotta data saadaan kartalle mahdollisimman nopeasti luettavaksi, voidaan käyttää toimintoa Reclassify. Tämä mahdollistaa sen, että kartasta on helppo lukea etäisyyksiä, esimerkiksi värien avulla.
Raster functions –toiminnon avulla saadaan käännettyä tehtävässä data siten, että toisin kuin aikaisemmassa tilanteessa keskityttiin matkaan koululta sairaalaan, nyt halutaan tietää suunnat sairaalasta kouluihin, sillä tämä on lähtötilanteessa tärkeämpää. Toimintoon syötetään alla oleva kaava.
Con(("Direction To Hospital" > 0) & ("Direction To Hospital" <= 180), "Direction To Hospital" + 180, Con("Direction To Hospital" > 180, "Direction To Hospital" - 180, 0))
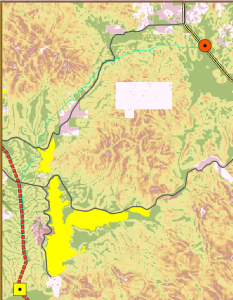
Bonustehtävän loppuosio keskittyi löytämään mahdollisimman alhaisella kustannuksella mahdollisimaan turvallisen reitin voimalaitoksen ja voimajohdon välille eteläisessä Kaliforniassa.
DEM-aineiston avulla voitiin tehdä Slope –toiminnolla uusi layer, jossa näkyi maaston kaltevuus (kuva 7).

Karttaan lisättiin uusi database, joka on reclassify slope -taulukko. Tämän avulla tehdään alkuperäiselle datalle Reclassify by Table –toiminto, jotta saadaan kaltevuusasteikko järkevämmäksi.
Sama toiminto tehdään Land use –rasterille, mutta toisena datana käytetään newlanduse –dataa, jonka läpi täytyy ensiksi tehdä Calculate Statistics. Slope-aineistojen uudelleenluokittelu oli helppoa, sillä niiden muuttujat ovat jatkuvia, kun taas landuse -datan muuttujat ovat diskreettejä. Reclassify –toiminnon jälkeen saadaan uusi maankäyttöä kuvavaa data, jota voidaan käyttää hyödyksi myöhemmissä vaiheissa. Näin data on valmisteltu painotettuun etäisyysanalyysiin.
Viimeisessä vaiheessa ensiksi Plus –toiminolla summattiin Landuse sekä Slope, jotta saatiin niiden Cost. Sitten käytettiin Cost distance –toimintoa, jolla saatiin aineistoon Direction ja Distance layerit. Näitä tarvittiin viimeiseen vaiheeseen, jossa Cost Path –toimintoon syötettiin haluttu lähtö paikka sekä Distance että Cost ja saatiin lopputulokseksi Least Cost Path. Kuvassa 8 näkyy sinisellä reitti näistä analyyseista saatu kustannustehokkain reitti.