
Näkyvyys- ja kuuluvuusanalyysejä
Tämän kerran tarkastelussa oli, kuinka toteuttaa näkyvyysanalyysi ja esittää se kartalla. Kuinka hyvin siis näkee paikasta A paikkaan B ottaen huomioon erilaiset tekijät kuten topografian, rakennukset ja kasvillisuuden. ) Se määrittelee myös useammasta pistekohteesta näkyvät alueet (Holopainen et al. (2015)).
Tärkeää näkymien tietäminen on esimeriksi maisemaselvityksessä ja kaupunkisuunnittelussa, sekä tiesuunnittelussa. Esimerkkinä, jos aiotaan rakentaa uusi rakennus ja halutaan tietää, kuinka hyvin rakennukseen tai rakennuksesta nähdään alueelle, on järkevää tehdä näkyvyysanalyysi. Tämän toki voi toteuttaa 3D-näkymässäkin joillain sovelluksilla. Myös kuuluvuutta voidaan tehdä samantyylisellä analyysillä, kuten tämän kerran harjoituksessa.
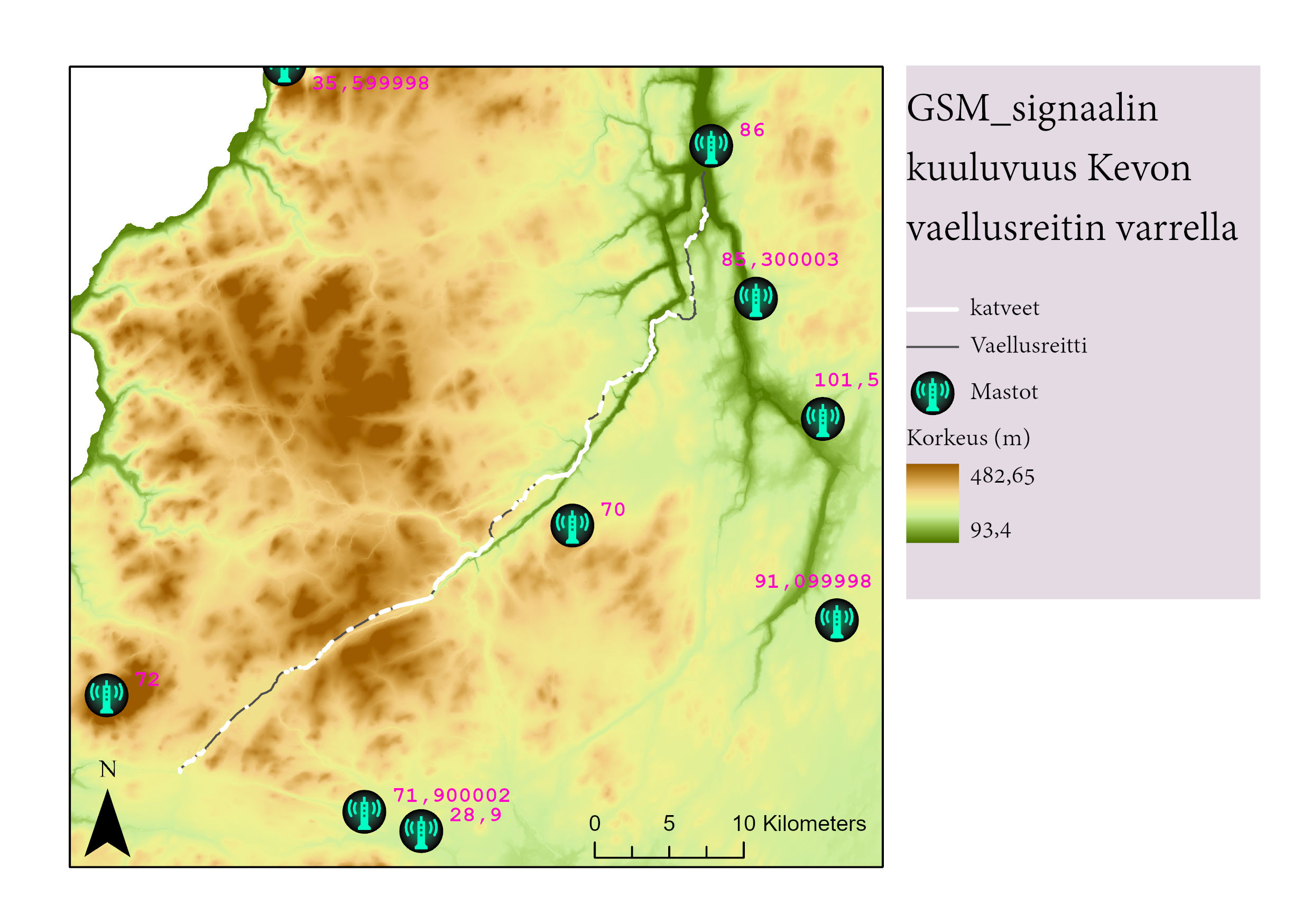
Näkyvyysanalyysi Kevon luonnonpuiston reitillä ja kuinka hyvä matkapuhelimen kuuluvuus reitillä on.
Edellisillä kerroilla käytetyn korkeusmallin avulla luotiin reitille korkeustiedot. Rinnevalovarjosteen sai helposti tuotua korkeusmallin rinnalle tuomalla sen “Raster functions” -paneelin kautta. Sitten sen muokkaminen onnistui kyseisen raster layerin ominaisuus -valikoista. Sitten “Layer Blend” eli tason yhteensopivuus korkeusmallin kanssa sovitetaan Multiply mallilla, jolloin nämä kaksi tasoa näyttivät yhdessä sopivilta.
Digitoin ensin reitin käyttäen apuna ArcGISPro:n valmiita karttatasoja, joista löysin kansallispuiston polkuja. Näiden päälle digitoin noin 65,6km pitkän reitin. Reitin pituus näkyi vaellusreitin 3D näkymän ominaisuustaulukosta.

Kuuluvuudet reitillä
Sitten kartalle tuotiin puhelinmastot, joihin käytettiin Maanmittauslaitoksen mastotietoja (mastojen korkeudet johdettu laserkeilausaineistosta). Luotiin näkyvyys puhelinmastoilta reitille, jonka avulla arvioitiin kuuluvuutta. Oletuksena siis oli, että signaali ei kuulu maastoesteiden toiselle puolelle, vaikka oikeasti heijatumalla kuuluukin. Käytin koko tehtävässä Model builderiä, joka toimi mielestäni helposti, nopeasti ja kivasti. Kuvasta 2. näkyykin työvaiheet selvästi Model Builderissä. GSM on siis signaali ja LOS tarkoittaa Line of sight.
Sitten paikannettiin katvealueet ja luotiin uudelle mastolle kohta, joka tavoittaisi nämä paikat mahdollisimman hyvin (etsittiin siis maaston korkein kohta).
Visibility työkalun avulla tuotettiin taso, jossa näkyy mastojen näkyvyys. Monien eri parametrien määrittelyjen jälkeen saatiin kartalle tiedot alueista, joissa mastoista näkyy reitille. Näitä parametrejä oli esimerkiksi korkeusmallin rasterin pikselin koon muuttaminen niin, että se määritettiin samaksi tälle uudelle tasolle, jotta molemmat tasot vastaisivat resoluutiolta ja sijainniltaan toisiaan.
Tuotetussa karttatasossa pikselin arvo on se, kuinka monen maston tukiasemasta on esteetön näköyhteys kyseiseen pikseliin (matalilla kohdilla esimerkiksi 5).
Sitten kyseinen taso luokiteltiin uusiksi niin, että näkyvyys riittää, kun reitiltä näkee edes yhteen mastoon. Tämä halutaan yksinkertaiseksi karttaesitykseksi, jossa on vain arvot “näkyy” ja “ei näy”. Siksi pikselit, jotka saavat arvon 0 halutaan NODATA eli arvottomiksi ja ne jotka saavat enemmän ovat aina 1.
Sitten tuotettu rasteri muutettiin polygoneiksi eli alueiksi, jotta voidaan tehdä seuraava vaihe. Erase:n avulla poistetaan vektorimuotoisen vaellusreitin kohdalta vektorimuotoinen kuuluvusanalyysi. Tällöin jäljelle jää reitti, jossa ei ole mukana kohtia, joissa GSM_LOS aineiston arvoa ei ole (näkyvyyttä ei ole). Ne kohdat reitillä, joissa signaali kuuluu, ovat otettu pois.
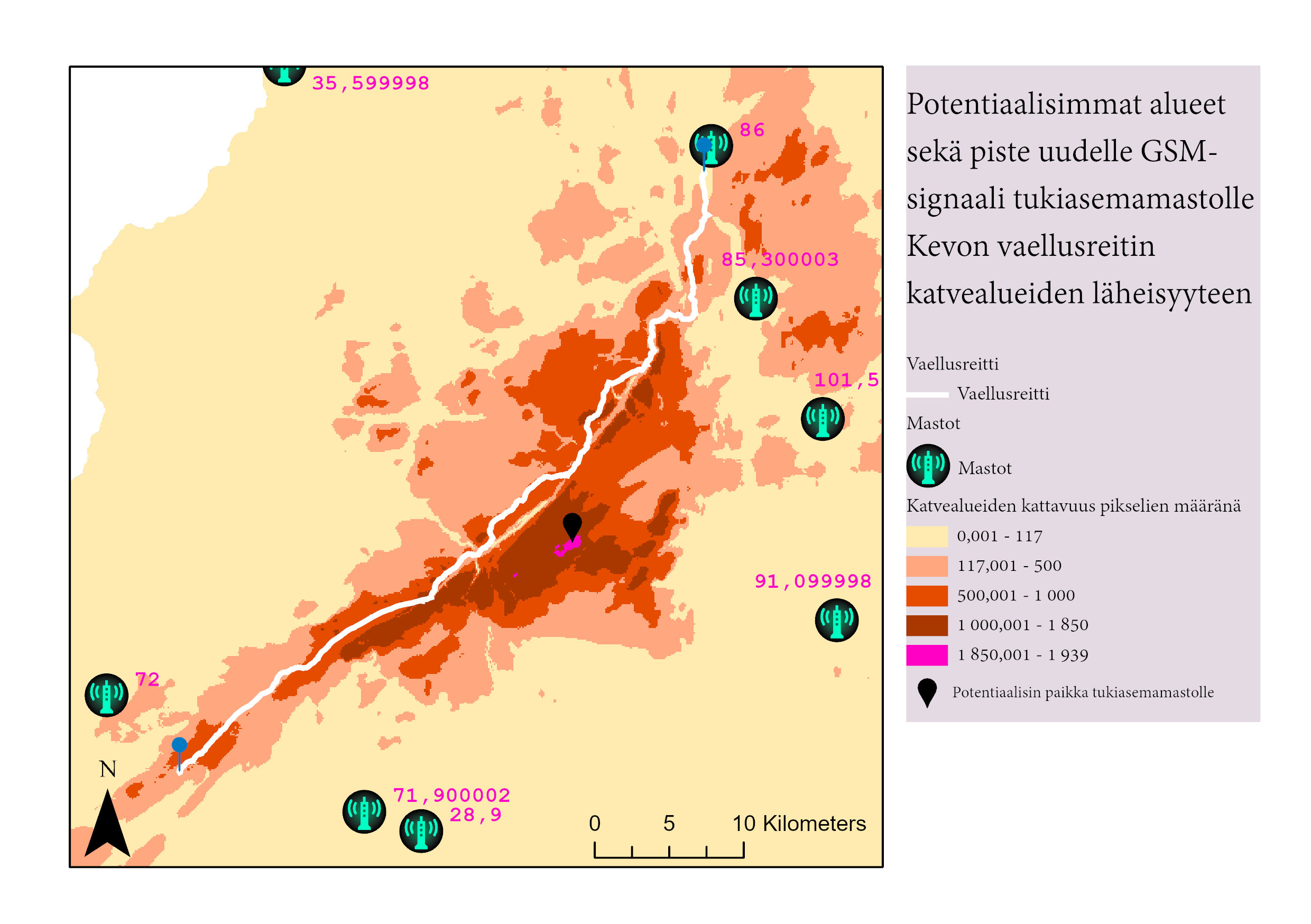
Mikä yllätti, oli se, miten pitkällä matkalla signaali ei kuulu. Tarkistin tämän luodun GSM_LOS tason avulla kun vertailin tätä pätkittäistä kuuluvuusanalyysin reittiä ja alkuperäistä vaellusreittiä keskenään. Tosiaan suurelta osalta matkaa kuuluvuus on nolla. Uuden pätkittäisen katvealuereitin pituus on 38km. Täten 27,5km reitiltä kuuluu signaali. Siis noin 75% reitistä on katvealueella.

Parannettiin kuuluvuutta lisäämällä uusi masto
Määritin ensin joten kuten sopivan kohdan uudelle mastolle korkeusmallista silmämääräisesti katsomalla. Sitten tein visibility toiminnon, jolla katsottiin näkyvyys vaellusreitin katveosuuksien ja maston korkeustiedon perusteella. Pikselin kokoa tuli muokata suuremmaksi, jotta ohjelma jaksaa nopeammin ja helpommin sitä pyörittää. Parametreihin laitettiin myös näkyvyys 2-70 metrin korkeudelta, koska masto on 70 metriä korkea ja ihminen noin kahden metrin korkuinen.
Se pyöritti todella pitkään ja hartaasti näkyvyysanalyysiä, joka kaikeksi onneksi onnistui ensimmäisellä kerralla. Huomasin jälkikäteen, että tein vahingossa suuremmalta alueelta analyysin, enkä vain reitin alueelta, mutta se ei kuitenkaan vaikuttanut lopputulokseen merkittävästi. Sitten etsin uuden tason tiedoista, että korkein arvo on 1939, joka tarkoittaa, että 1939 eri pikselistä reitillä on näkyvyys tähän pikseliin.
Sen jälkeen vain visualisoitiin kartta niin, että korkeimman arvon saaneet pikselit erottuvat selkeimmin. Kartan pikselien arvot kertovat, kuinka monesta pikselistä reitin varrella näkyy kyseiseen tiettyyn pikseliin. Yhden pikselin arvo on 1939, joka on suurin mahdollinen arvo. Tähän olisi siis paras sijoittaa masto. visualisoin kartan niin, että siihen jäi vain tämä 1939 arvo, jotta löysin kyseisen pikselin. koordinaatit tähän pisteeseen ovat 26, 7826767 astetta E, 69, 5334903 astetta N. Laitoin kohdalle pisteen. Tämän jälkeen visualisoin kartan vielä uudelleen lopulliseksi.
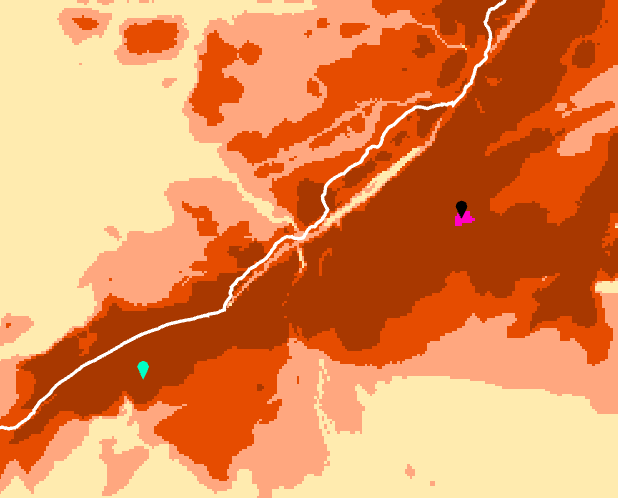
Vertasin ensimmäisen pisteen paikkaa lopulliseen. Kuten kuvasta 5. näkyy, piste oli ihan hyvällä sijainnilla. Sen arvo oli 1649, mikä on suuri, muttei alueen suurin. Täten se ei kattanut niin paljon reitin alueita kuin uuden maston sijainti. Lopullinen piste sijaitsi enemmän reitin keskivaiheella, mikä oli ehkä paremmin sijoitettu.
Resoluution pienentäminen vähenti arvot 0-1939 välille eikä sitä suuremmiksi. Minusta se oli hyvä, jotta kartta pysyi luettavana eivätkä arvot olleet äärettömän suuret.
Kuuluvuus parani uuden maston myötä
Ne alueet reitillä, joissa on päällekkäin vanhojen sekä uuden maston katvealueet, ovat edelleen uuden maston pystyttämisen jälkeen katvealueita. Niin kuin kartasta huomaa, niitä on reitin varrella edelleen jonkin verran. Kuitenkin kuuluvuuden sisällä olevia kohtiakin on nyt enemmän.
Laskin, että ilman uutta mastoa, reitin kuuluvuus oli 75% katvealueilla. Uuden maston jälkeen kuuluvuus nousi ja katvealueet laskivat niin, että katvealueiden määrä kilometreissä oli 21km koko 65,5km matkalta, mikä on noin 32% koko reitin kuuluvuudesta. Tämä tarkoittaa sitä, että uuden maston myötä kuuluvuus nousi ja katvealueiden prosenttiyksikkö laski huimat 43 %-yksikköä.
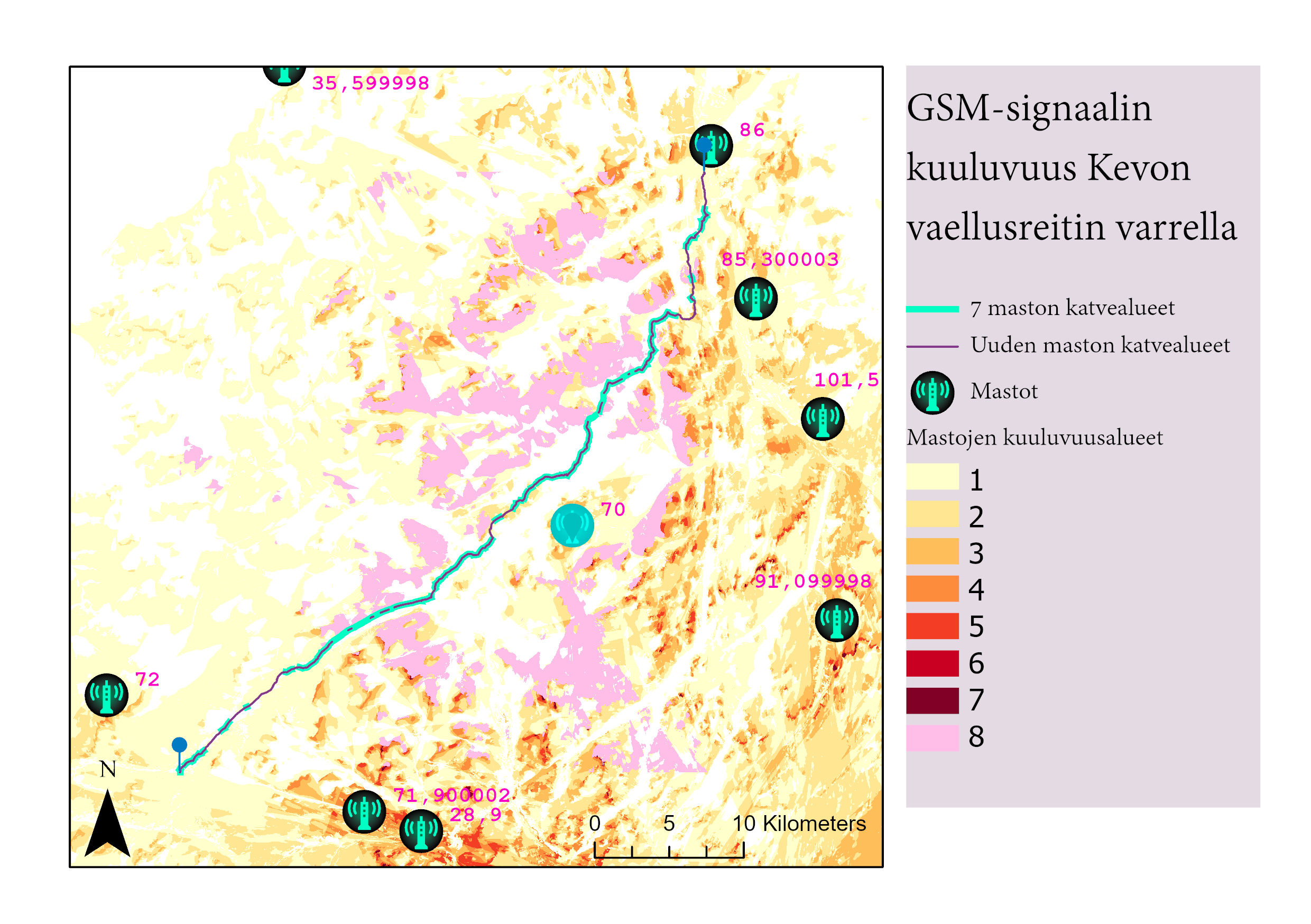
Loin vielä Intersect-toiminnon avulla uuden tason, jossa oli yhdessä vain vanhojen mastojen sekä uuden maston yhteiset katvealueet (koska riittää, että kuuluvuus on edes yhdestä mastosta). Jostain syystä rinnevalovarjoste jäi puuttumaan kun exporttasin kartan tänne.
Lähteet:
Sofia Salonen, Geoinformatiikan menetelmät 2 – MAA-221, syksy 2023